
产品中心
PRODUCT CENTER

产品导航

咨询热线
86-022-27342234
86-022-27373924

 返回
返回
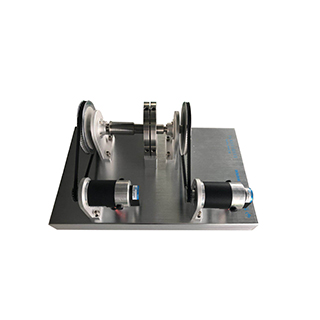
直流伺服系统控制平台
产品型号:GSMT2014-II
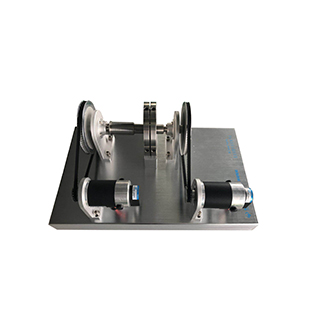
 在工业应用领域中,运动控制系统必须具备强抗扰动的能力来保证其运动状态的稳定。综合伺服系统控制平台GSMT2014为相关专业师生提供了该类应用的模拟平台。实现过程为,A伺服模拟外部阻力来给B伺服提供扰动信号,B伺服在扰动下保持状态稳定,实现正常运行。实验过程中,系统转动惯量和负载扭矩的前提下,通过专用软件调整驱动器的电流环、速度环和位置环的参数;调整运动控制器的速度环、位置环参数,从而使系统达 到稳、准、快、强的期望性能指标要求。通过实验过程,初学者将完成伺服系统参数调试方法学习,PID学习,掌握系统负载惯量和负载扭矩对系统的影响,研究者也可以进行伺服控制系统建模和算法优化实现稳定控制的探索。可实现以下实验内容:
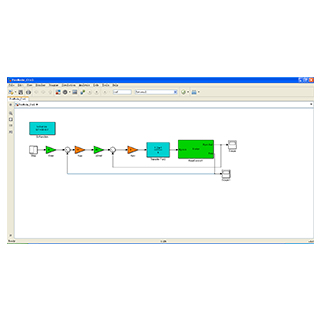
在工业应用领域中,运动控制系统必须具备强抗扰动的能力来保证其运动状态的稳定。综合伺服系统控制平台GSMT2014为相关专业师生提供了该类应用的模拟平台。实现过程为,A伺服模拟外部阻力来给B伺服提供扰动信号,B伺服在扰动下保持状态稳定,实现正常运行。实验过程中,系统转动惯量和负载扭矩的前提下,通过专用软件调整驱动器的电流环、速度环和位置环的参数;调整运动控制器的速度环、位置环参数,从而使系统达 到稳、准、快、强的期望性能指标要求。通过实验过程,初学者将完成伺服系统参数调试方法学习,PID学习,掌握系统负载惯量和负载扭矩对系统的影响,研究者也可以进行伺服控制系统建模和算法优化实现稳定控制的探索。可实现以下实验内容:EasyMotion Studio软件的使用;单电机的PID参数调整;不同转动惯量下PID参数调整;干扰对位置环、速度环的影响;系统建模和稳定性分析;二阶系统时域分析;三阶系统的根轨迹分析;频率特性分析;PID校正;根轨迹法校正;二阶系统频域法校;二阶系统状态反馈;位置模式实时控制。
