
产品中心
PRODUCT CENTER

产品导航

咨询热线
86-022-27342234
86-022-27373924

 返回
返回
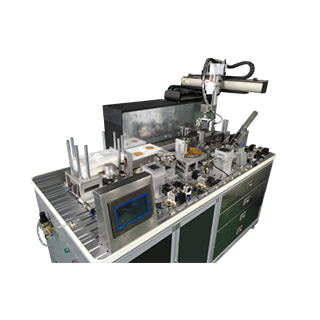
多电机模型运动控制开发平台
产品型号:GPD-OAMC-1000
 多电机模型运动控制开发平台,平台采用IEC61131-3标准的开发环境,提供全套的电气原理图、元器件布局图、电气工艺图,更完善的实验指导资源。在该实验平台上,主要可以掌握四大块知识体系:机械与运动控制;运动控制技术;PAC开发技术;外设资源集成。平台具备十余种机构设计,从丝杆模组,到摆杆、分度盘,再到机器视觉,提供最丰富的被控对象,精巧的实验设计,让学生把各个学科的知识串联起来,在实验细节体现知识点,通过整个实验流程,让学生把知识点构成知识网络,完全开放式的架构。 XYZ机械手: 1轴采用直线电机, 2轴采用交流伺服电机,丝杆传动;3轴采用步进电机,同步带传动;机械手末端,气动翻转。 托盘料笼:采用直流电机控制下料,推杆结构出笼。 采用气动摆杆机构。 DDR电机分度盘机构。 有4角夹持定位机构与料仓配合,实现二次定位精密装配。 角度可设定气动翻转机构。 步进电机驱动倍速链传送带。 定位稍精密装配定位机构。 可实现以下实验内容:
多电机模型运动控制开发平台,平台采用IEC61131-3标准的开发环境,提供全套的电气原理图、元器件布局图、电气工艺图,更完善的实验指导资源。在该实验平台上,主要可以掌握四大块知识体系:机械与运动控制;运动控制技术;PAC开发技术;外设资源集成。平台具备十余种机构设计,从丝杆模组,到摆杆、分度盘,再到机器视觉,提供最丰富的被控对象,精巧的实验设计,让学生把各个学科的知识串联起来,在实验细节体现知识点,通过整个实验流程,让学生把知识点构成知识网络,完全开放式的架构。 XYZ机械手: 1轴采用直线电机, 2轴采用交流伺服电机,丝杆传动;3轴采用步进电机,同步带传动;机械手末端,气动翻转。 托盘料笼:采用直流电机控制下料,推杆结构出笼。 采用气动摆杆机构。 DDR电机分度盘机构。 有4角夹持定位机构与料仓配合,实现二次定位精密装配。 角度可设定气动翻转机构。 步进电机驱动倍速链传送带。 定位稍精密装配定位机构。 可实现以下实验内容:自动化系统认知、同步带传动使用方法、丝杆传动使用方法、直线电机使用方法、DDR电机使用方法、气动元件认知、机械精密装配、摆杆机构认知及设计、推杆结构认知及设计、分度盘认知及设计、倍速链认知及设计、二次定位常用方法、锥形孔定位方法、运动传感器认知、单轴运动控制、两轴运动控制、插补运动、IEC61131-3程序开发、外设集成。
