
产品中心
PRODUCT CENTER

产品导航

咨询热线
86-022-27342234
86-022-27373924

 返回
返回

冗余并联机器人
产品型号:GPM系列
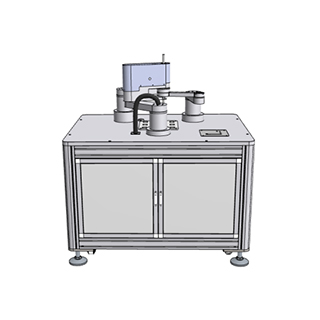
 冗余并联机器人是由多个并行链构成的闭链运动系统,即末端执行器通过至少两个独立运动链与机座相连。冗余并联机器人结构上具有低惯量、大负载能力、高速高精度等优点,故它在精密仪器、现代机床、高速自动化生产线等领域有着广阔的应用前景。 GPM系列冗余并联机器人由同一个平面内的三个二开杆链机构连接而成,末端执行器安装在开链机构相同的地方,整个机构由三个分别安装在基座处的绝对值交流伺服电机驱动,电机控制控制GTS-400-PV的控制卡实现,电机的转角可以通过绝对位置编码器得到。该机构实际上可以看作是传统的五杆机构附加了一条支链,该冗余支链可以消除五杆机构的奇异性,改善力传递性能,并且得到唯一的前向运动学解。同时冗余驱动使得机构的模型更加复杂,进而对系统策略的要求跟高,这也就使冗余并联机器人的研究工作变得更具有挑战性。 GPM系列冗余并联机器人是开展机构学、工作空间、运动学、奇异性、力传递性能、动力学、控制策略、轨迹规划、标定等研究的理想平台,同时也可以作为多输入多输出非线性系统的研究对象。
冗余并联机器人是由多个并行链构成的闭链运动系统,即末端执行器通过至少两个独立运动链与机座相连。冗余并联机器人结构上具有低惯量、大负载能力、高速高精度等优点,故它在精密仪器、现代机床、高速自动化生产线等领域有着广阔的应用前景。 GPM系列冗余并联机器人由同一个平面内的三个二开杆链机构连接而成,末端执行器安装在开链机构相同的地方,整个机构由三个分别安装在基座处的绝对值交流伺服电机驱动,电机控制控制GTS-400-PV的控制卡实现,电机的转角可以通过绝对位置编码器得到。该机构实际上可以看作是传统的五杆机构附加了一条支链,该冗余支链可以消除五杆机构的奇异性,改善力传递性能,并且得到唯一的前向运动学解。同时冗余驱动使得机构的模型更加复杂,进而对系统策略的要求跟高,这也就使冗余并联机器人的研究工作变得更具有挑战性。 GPM系列冗余并联机器人是开展机构学、工作空间、运动学、奇异性、力传递性能、动力学、控制策略、轨迹规划、标定等研究的理想平台,同时也可以作为多输入多输出非线性系统的研究对象。
GPM2003三轴冗余并联机器人:第三轴为上下轴。
GPM2004四轴冗余并联机器人:第三轴为垂直轴,第四轴为末端旋转轴。
特有的平面关节结构设计,且连杆选用铝制合金材料,使得整个机构的惯量小,精度高。
以带有绝对值的交流伺服电机和谐波减速器等标准工业产品作为驱动和传动装置,具有很高的质量和可靠性,且结构紧凑简单,精度高。
控制系统采用高性能运动控制器,便于用户进行控制策略和运动规划算法的研究。
机构设计灵活,可以方便的拆除三个支链中的任意一个从而用于五杆机构的实验。
GPM2004四轴冗余并联机器人:第三轴为垂直轴,第四轴为末端旋转轴。
特有的平面关节结构设计,且连杆选用铝制合金材料,使得整个机构的惯量小,精度高。 以带有绝对值的交流伺服电机和谐波减速器等标准工业产品作为驱动和传动装置,具有很高的质量和可靠性,且结构紧凑简单,精度高。 控制系统采用高性能运动控制器,便于用户进行控制策略和运动规划算法的研究。 机构设计灵活,可以方便的拆除三个支链中的任意一个从而用于五杆机构的实验。 可实现以下实验内容:并联机构几何参数(C语言);并联机构正向运动学(C语言);并联机构反向运动学(C语言);并联机构工作空间确定(C语言);动力学控制实验(只提供Matlab版本接口说明及应用说明)。
