
产品中心
PRODUCT CENTER

产品导航

咨询热线
86-022-27342234
86-022-27373924

 返回
返回
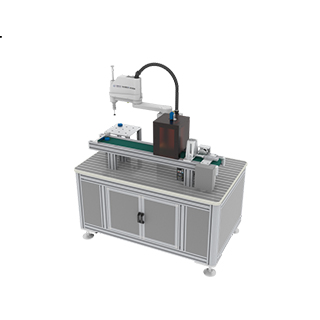
四自由度Scara机器人
产品型号:GRB3024系列
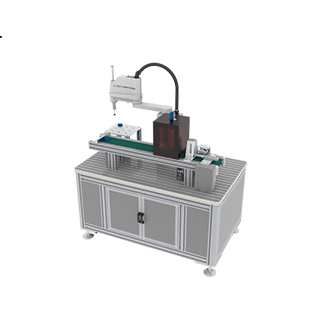
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向,另一个关节是移动关节,用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,适用于平面定位,垂直方向进行装配的作业。
 GRB3024-II,四自由度Scara机器人:PCI运动控制卡,含基于C++源代码 GRB3024-ROBOT-TC,四自由度Scara机器人视觉跟踪系统:基于工业机器人控制系统,含视觉跟踪工艺。 GRB3024-ROBOT-VS,四自由度Scara机器人手眼视觉系统:基于工业机器人控制系统,含视觉工艺。
GRB3024-II,四自由度Scara机器人:PCI运动控制卡,含基于C++源代码 GRB3024-ROBOT-TC,四自由度Scara机器人视觉跟踪系统:基于工业机器人控制系统,含视觉跟踪工艺。 GRB3024-ROBOT-VS,四自由度Scara机器人手眼视觉系统:基于工业机器人控制系统,含视觉工艺。
实验内容:
基于运动控制卡的Scara机器人
机电一体化与机器人基础(C语言)
机器人运动学分析(轨迹规划算法、机器人正逆解)(C语言)
机器人图形示教实验(C语言)
机器人图形示教程序的设计和实现(C语言)
Scara机器人GRL语言编程
机器人网络仿真与远程控制
动力学控制实验(只提供Matlab版本接口说明及应用说明)
基于工业机器人系统的Scara机器人
码垛标定
DH模型设置
轴关节参数设置
通讯参数设置
笛卡尔坐标系设置
机器人零位标定
位置点记录
IO控制
以太网通讯
变量参数设置
视觉跟踪工艺标定或视觉工艺标定
机器人示教编程
工业机器人系统二次开发(选配二次开发函数库)
基于运动控制卡的Scara机器人
机电一体化与机器人基础(C语言) 机器人运动学分析(轨迹规划算法、机器人正逆解)(C语言) 机器人图形示教实验(C语言) 机器人图形示教程序的设计和实现(C语言) Scara机器人GRL语言编程 机器人网络仿真与远程控制 动力学控制实验(只提供Matlab版本接口说明及应用说明)基于工业机器人系统的Scara机器人
码垛标定 DH模型设置 轴关节参数设置 通讯参数设置 笛卡尔坐标系设置 机器人零位标定 位置点记录 IO控制 以太网通讯 变量参数设置 视觉跟踪工艺标定或视觉工艺标定 机器人示教编程 工业机器人系统二次开发(选配二次开发函数库)